Method Overview
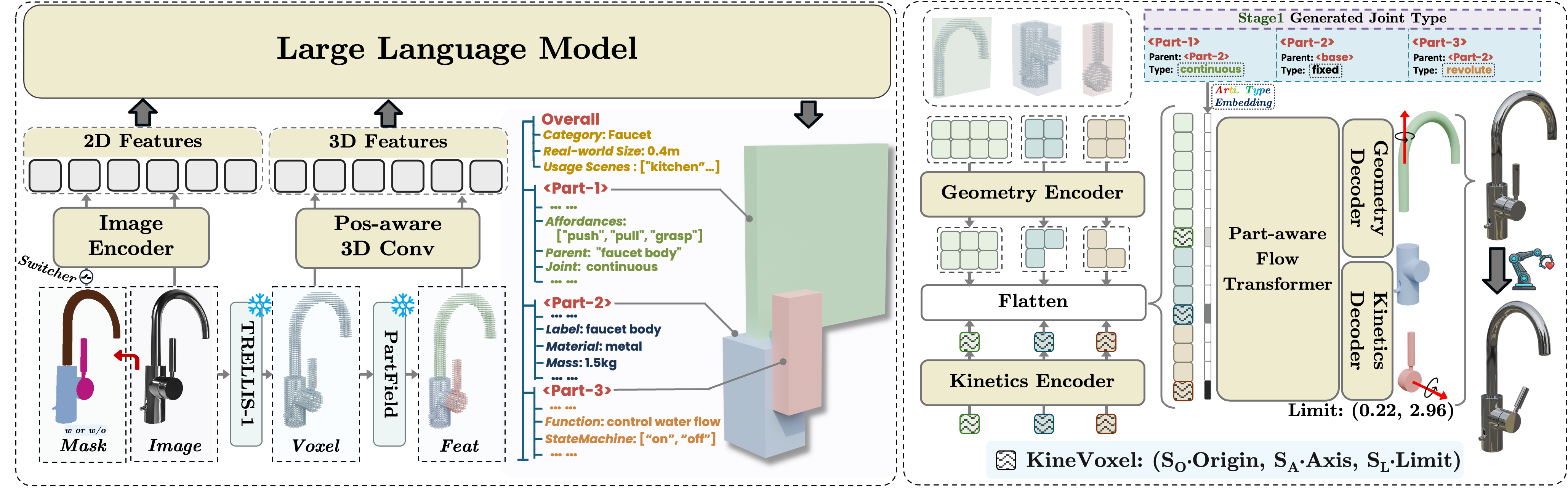 PhysForge is a decoupled two-stage framework for physics-grounded 3D asset generation.
In Stage 1 (VLM-based Planning), a fine-tuned VLM acts as a "physical architect": taking a single image,
an optional 2D mask, and TRELLIS voxel as input, it autoregressively generates a
Hierarchical Physical Blueprint that specifies per-part bounding boxes, parent-child relationships,
joint types, and rich physical properties such as material, mass, intrinsic function, state machines, and atomic affordances.
In Stage 2 (Diffusion-based Generation), a diffusion model conditioned on this blueprint employs our novel
KineVoxel Injection (KVI) mechanism to synergistically synthesize high-fidelity geometry, texture, and
precise kinematic parameters (joint origin, axis, and limits) within a unified denoising framework, producing functionally
complete, simulation-ready assets.
PhysForge is a decoupled two-stage framework for physics-grounded 3D asset generation.
In Stage 1 (VLM-based Planning), a fine-tuned VLM acts as a "physical architect": taking a single image,
an optional 2D mask, and TRELLIS voxel as input, it autoregressively generates a
Hierarchical Physical Blueprint that specifies per-part bounding boxes, parent-child relationships,
joint types, and rich physical properties such as material, mass, intrinsic function, state machines, and atomic affordances.
In Stage 2 (Diffusion-based Generation), a diffusion model conditioned on this blueprint employs our novel
KineVoxel Injection (KVI) mechanism to synergistically synthesize high-fidelity geometry, texture, and
precise kinematic parameters (joint origin, axis, and limits) within a unified denoising framework, producing functionally
complete, simulation-ready assets.
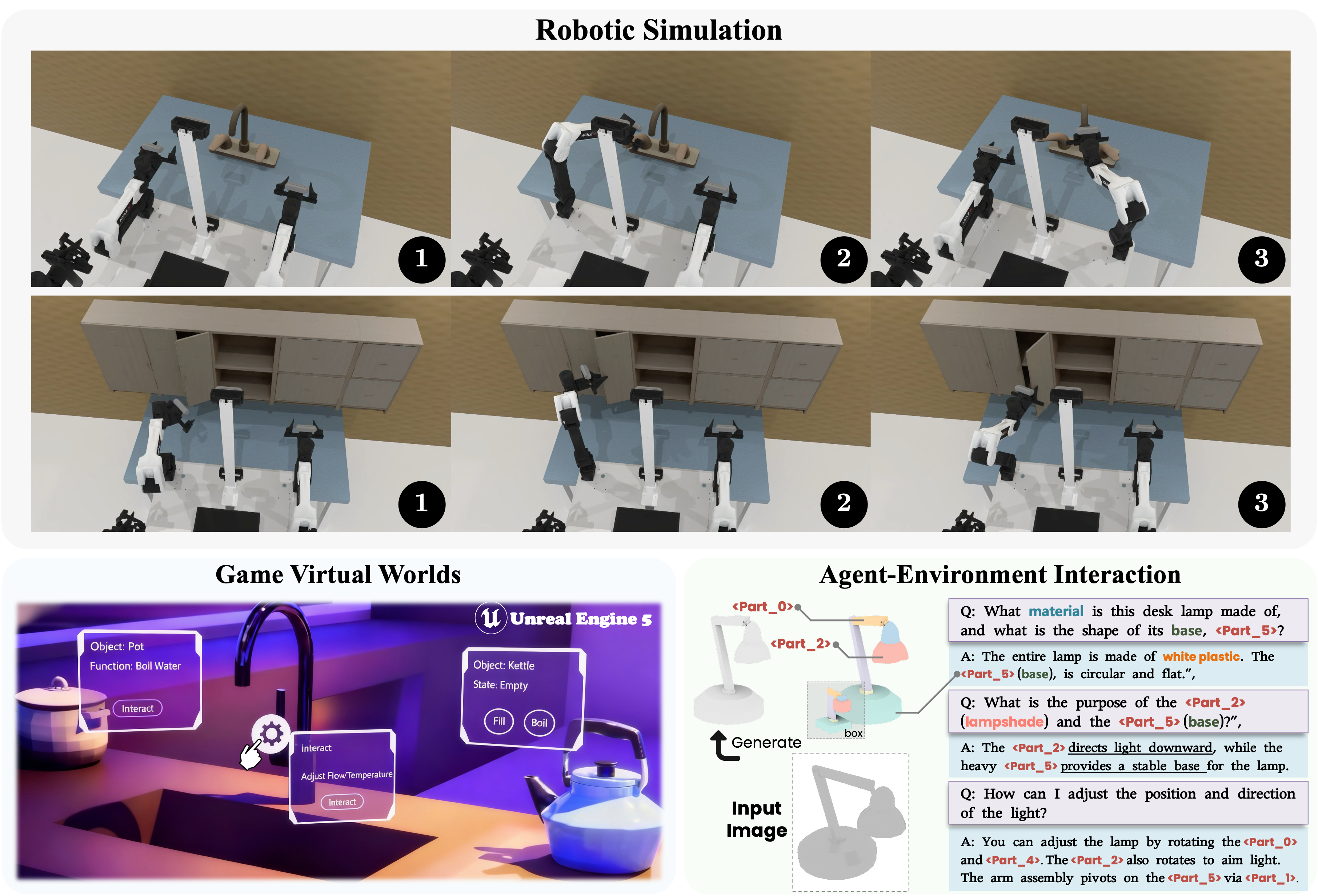 PhysForge produces functionally complete, simulation-ready 3D assets that directly unlock a range of downstream applications.
(a) Robotic Simulation: our assets can be imported into simulators such as RoboTwin, where the detailed part-level
geometry and precise kinematic parameters allow robotic manipulators to realistically interact with functional parts.
(b) Virtual Worlds: in game engines and interactive virtual worlds, every part is endowed
with physics-grounded attributes, enabling developers to design sophisticated interaction logic directly.
(c) Agent-Environment Interaction: our VLM-based framework opens a new modality of interaction—an embodied agent
can directly query an asset in natural language and receive a text-based physical blueprint with bounding boxes, providing an explicit
plan for manipulation.
PhysForge produces functionally complete, simulation-ready 3D assets that directly unlock a range of downstream applications.
(a) Robotic Simulation: our assets can be imported into simulators such as RoboTwin, where the detailed part-level
geometry and precise kinematic parameters allow robotic manipulators to realistically interact with functional parts.
(b) Virtual Worlds: in game engines and interactive virtual worlds, every part is endowed
with physics-grounded attributes, enabling developers to design sophisticated interaction logic directly.
(c) Agent-Environment Interaction: our VLM-based framework opens a new modality of interaction—an embodied agent
can directly query an asset in natural language and receive a text-based physical blueprint with bounding boxes, providing an explicit
plan for manipulation.